


CAN Bus Basics: A Comprehensive Guide to Understanding Controller Area Networks
Short and powerful, the CAN bus is the communication backbone of modern vehicles, robotics, and industrial automation. This article breaks down how it works, why it matters, and what every engineer should know.
Table of Contents
- What Is CAN Bus?
- Why CAN Bus Matters
- How CAN Bus Works
- CAN Bus Architecture
- Data Framing and Protocol Structure
- CAN Bus Speeds and Types
- Error Handling and Reliability
- Applications Across Industries
- Top 5 Frequently Asked Questions
- Final Thoughts
- Resources
What Is CAN Bus?
The Controller Area Network (CAN bus) is a robust, message-based communication protocol developed by Bosch in the 1980s. Its purpose is simple: allow multiple electronic control units (ECUs) to communicate efficiently without needing a central host computer. Instead of point-to-point wiring, CAN enables a shared communication line where all nodes listen and transmit as needed. This design reduces wiring complexity and enhances system resilience.
At its core, CAN is built for real-time, fault-tolerant communication—making it ideal for environments where reliability is non-negotiable.
Why CAN Bus Matters
Modern systems—from passenger vehicles to aerospace platforms—depend on dozens of microcontrollers. Without a shared communication protocol, wiring would become unmanageable.
Key advantages include:
– Dramatically reduced wiring harness complexity
– High noise immunity through differential signaling
– Collision-free data transmission via nondestructive arbitration
– Deterministic timing for real-time systems
– Low cost, low overhead, and high reliability
Automotive wiring reductions alone have been estimated at nearly 40% since CAN adoption. This improves manufacturability, reduces weight, and lowers system failure risk.
How CAN Bus Works
CAN operates on a broadcast communication model. Every message is transmitted to all nodes simultaneously, but each node decides whether the message is relevant. Rather than using device addresses, CAN relies on message identifiers that represent data meaning, not sender origin.
Significant operational elements include:
– **Differential signaling:** two lines, CAN-H and CAN-L, which improve noise resistance.
– **Dominant vs. recessive bits:** dominant bits override recessive ones, enabling arbitration.
– **Arbitration by priority:** lower message ID = higher priority.
This system ensures that high-importance signals like braking data always have priority in transmission.
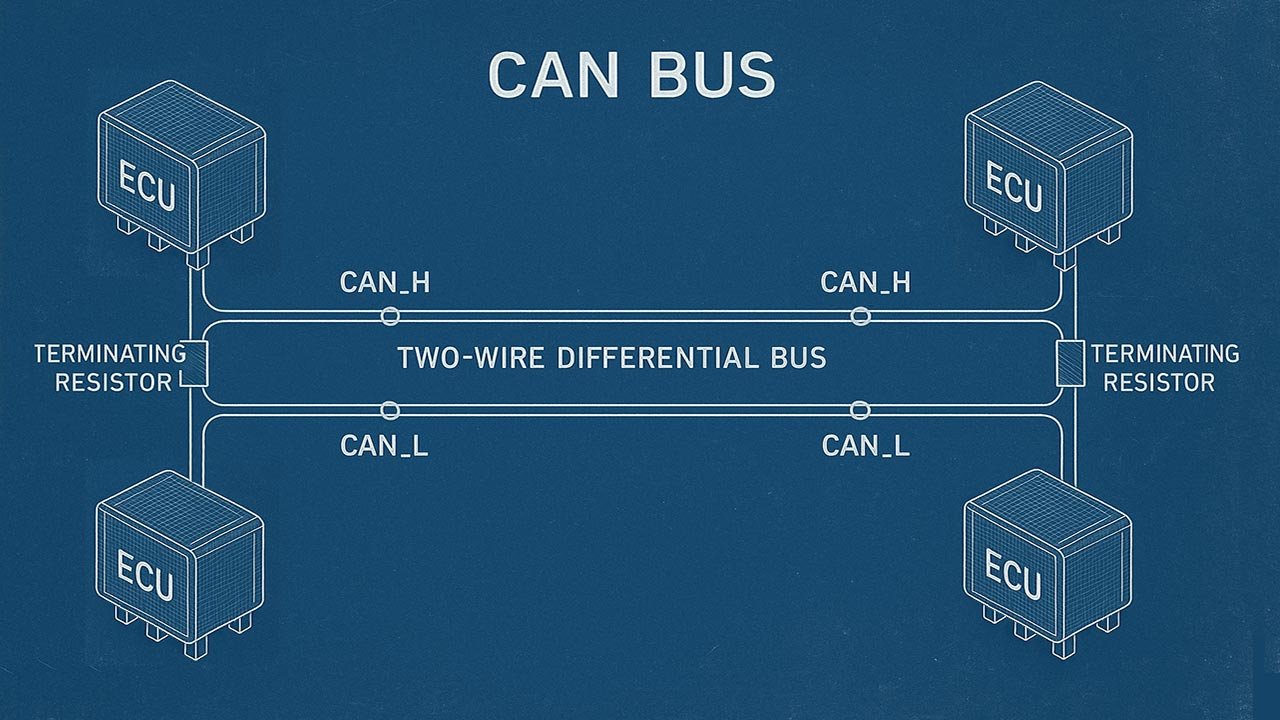
CAN Bus Architecture
A typical CAN network includes:
– Two-wire differential bus (CAN-H and CAN-L)
– Terminating resistors at each end of the bus
– Multiple nodes with transceivers and controllers
– Optional power distribution integrated into the harness
CAN nodes fall into three categories:
1. **Master nodes** (manage system timing and diagnostics)
2. **Slave nodes** (sensors, actuators, auxiliary modules)
3. **Hybrid nodes** (multifunctional ECUs)
The physical layer is standardized under ISO 11898, ensuring interoperability across manufacturers and industries.
Data Framing and Protocol Structure
CAN uses structured message frames composed of:
– **Start of frame (SOF)**
– **Arbitration ID**
– **Control field**
– **Data field (0–8 bytes for classic CAN, up to 64 for CAN FD)**
– **Cyclic redundancy check (CRC)**
– **Acknowledgment (ACK) slot**
– **End of frame (EOF)**
CAN messages are deterministic because arbitration ensures that only the highest-priority message continues onto the bus without delay.
**Classic CAN vs. CAN FD**
CAN FD (Flexible Data-Rate) extends data payload size and increases throughput, enabling modern applications such as ADAS, infotainment, and real-time diagnostics.
CAN Bus Speeds and Types
CAN supports several speed profiles:
– **High-speed CAN (HS-CAN):** up to 1 Mbps
– **Low-speed CAN (LS-CAN):** up to ~125 kbps, with fault-tolerant capability
– **CAN FD:** up to 5+ Mbps
The industry often follows these standards:
– **ISO 11898-2** for high-speed
– **ISO 11898-3** for low-speed
– **ISO 11898-7** for CAN FD
Node count can reach dozens without significant performance degradation, depending on bus length, termination quality, and electrical environment.
Error Handling and Reliability
One of CAN’s greatest strengths is its built-in error detection mechanisms. These include:
– Cyclic redundancy checks
– Bit monitoring and stuffing checks
– Frame checks
– Acknowledgment monitoring
– Automatic retransmission
CAN nodes maintain internal error counters. If a node becomes faulty, it automatically transitions into error-passive mode, and eventually bus-off mode if necessary. This preserves overall network stability even in the presence of malfunctioning devices.
Applications Across Industries
Although developed for automotive, CAN has expanded into multiple sectors:
**Automotive**
– Engine control
– Transmission modules
– ABS and ESP systems
– Infotainment
– Advanced driver assistance systems
**Industrial Automation**
– Robotics
– Distributed control systems
– Process automation
**Medical Devices**
– Imaging systems
– Diagnostic equipment
– Infusion pumps requiring real-time coordination
**Aerospace and Defense**
– Avionics networks
– Monitoring and telemetry
– Actuator control systems
**Consumer Electronics**
– Electric bicycles
– Smart HVAC systems
– Power-distribution controllers
CAN’s versatility continues to grow with the rise of electric vehicles, autonomous systems, and IoT-integrated industrial networks.
Top 5 Frequently Asked Questions
Final Thoughts
The most important takeaway is that CAN bus succeeds because it blends simplicity with high reliability. Its arbitration method ensures deterministic communication, its differential signaling provides strong noise immunity, and its protocol structure guarantees robust error detection. These characteristics make CAN indispensable in environments where real-time data exchange must be both predictable and safe. As systems continue to grow in complexity—especially with electrification, automation, and autonomy—CAN bus remains foundational, reinforced by newer extensions such as CAN FD that keep it relevant for next-generation applications.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment