


Automotive CAN Bus Basics: The Controller Area Network
The Controller Area Network (CAN Bus) is the silent digital backbone of every modern vehicle. It allows electronic control units (ECUs) — from the engine and transmission to airbags and infotainment — to communicate efficiently without a central computer. This article explores CAN Bus fundamentals, architecture, message protocols, benefits, and its evolution in the automotive industry.
Table of Contents
- Introduction to the CAN Bus
- Why CAN Bus Was Developed
- Core Principles of CAN Communication
- Components of a CAN Network
- Types of CAN Protocols
- Advantages of the CAN Bus
- Common CAN Bus Applications in Modern Vehicles
- Diagnosing CAN Bus Problems
- The Future of Automotive Networking: Beyond CAN
- Top 5 Frequently Asked Questions
- Final Thoughts
- Resources
Introduction to the CAN Bus
The Controller Area Network (CAN Bus) is a robust vehicle communication system that connects multiple electronic control units (ECUs) using a two-wire network. Originally developed by Bosch in 1986, the CAN Bus eliminates the need for complex wiring harnesses, replacing them with a simple, serial communication protocol that enables fast, reliable, and error-resistant data transmission. In essence, CAN Bus acts like a digital nervous system — allowing sensors, actuators, and controllers to “talk” to each other in real time.
Why CAN Bus Was Developed
Before CAN, automotive wiring was complex and inefficient. Each sensor or device required a direct wire to its controller, leading to heavy, failure-prone harnesses. As electronics proliferated — power windows, ABS, airbags, engine controls — the need for a standardized communication network became urgent. Bosch introduced CAN to:
- Reduce wiring complexity
- Improve fault tolerance
- Allow ECUs to share sensor data
- Enable real-time system control
By 1993, CAN had become an international standard (ISO 11898), and by the early 2000s, it was implemented in nearly every vehicle.
Core Principles of CAN Communication
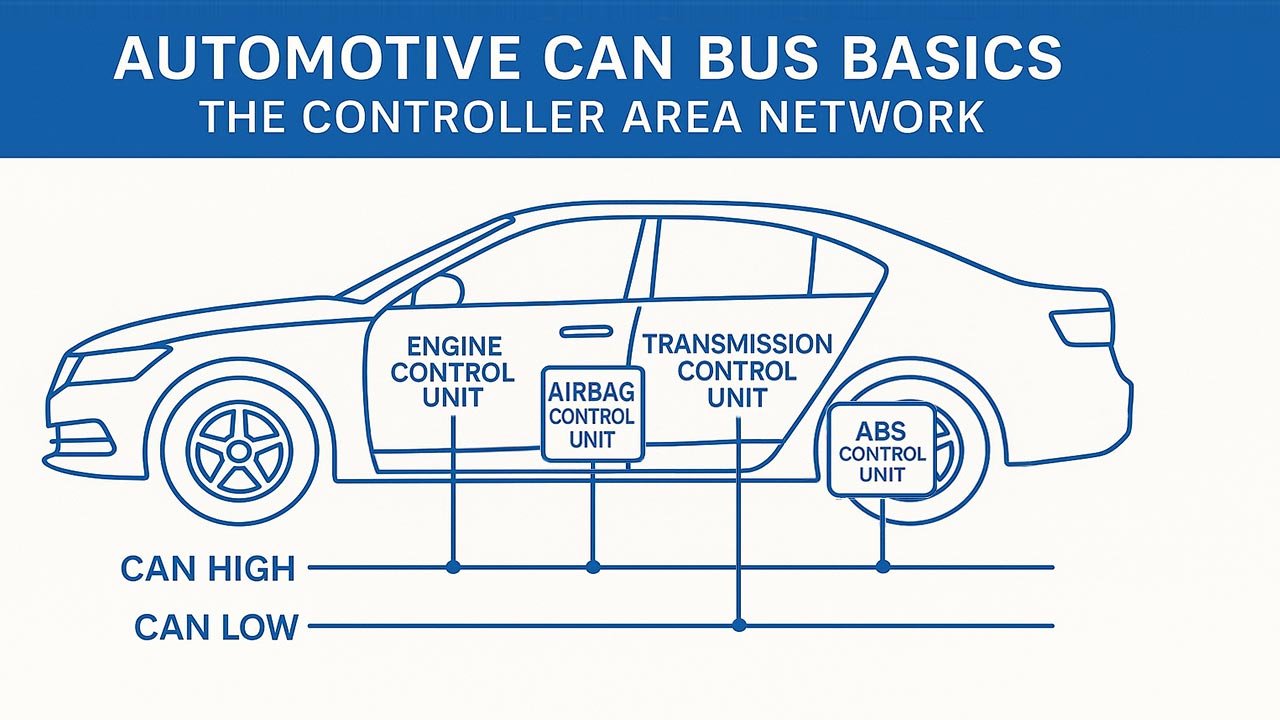
CAN High and CAN Low
CAN Bus communication uses two differential signal lines:
- CAN High (CAN H) — carries the dominant signal (logic 1)
- CAN Low (CAN L) — carries the recessive signal (logic 0)
When transmitting data, voltage levels between the two lines change, allowing for noise-resistant differential signaling. This ensures reliable communication even in electrically noisy environments like engines.
Message Frames
Messages on a CAN network are broadcast-based — meaning every node receives every message, but only the intended one responds. A standard CAN frame consists of:
- Identifier (11 or 29 bits) – determines message priority
- Data Field (0–8 bytes) – the actual payload
- CRC Field – error detection
- ACK Field – acknowledgment of successful transmission
Bitwise Arbitration
One of CAN’s most impressive features is non-destructive bitwise arbitration.
highest priority identifier (lowest binary value) continues, while others back off without losing data — ensuring deterministic communication.
Components of a CAN Network
ECUs and Nodes
Each electronic control unit (ECU) or node — such as the engine control module or anti-lock braking system — connects to the CAN Bus through a transceiver.
Termination Resistors
Two 120-ohm resistors are placed at both ends of the CAN Bus to minimize signal reflection and ensure signal integrity across the network.
Transceivers and Controllers
- Transceiver: Converts CAN signals from digital to differential voltage for physical transmission.
- Controller: Manages message framing, arbitration, and error handling according to the CAN protocol.
Types of CAN Protocols
Classical CAN
- Data rate: Up to 1 Mbps
- Payload: 8 bytes
- The original Bosch specification — ideal for basic control systems like powertrain or body control modules.
CAN FD (Flexible Data-Rate)
Introduced in 2012, CAN FD offers:
- Data rate: Up to 8 Mbps
- Payload: Up to 64 bytes
- Improved efficiency and faster ECU communication.
CAN XL
The latest evolution, CAN XL, extends data throughput to 20 Mbps and supports 2,048-byte payloads. It’s designed for advanced automotive architectures such as autonomous driving and high-resolution sensor networks.
Advantages of the CAN Bus
- Reduced Wiring Complexity — fewer cables, lighter vehicles.
- Real-Time Communication — deterministic messaging ensures immediate response.
- Fault Tolerance — automatic error detection and retransmission.
- Scalability — supports multiple ECUs without rewiring.
- Cost Efficiency — standardized components and simple architecture.
Common CAN Bus Applications in Modern Vehicles
- Powertrain Control: Engine, transmission, and fuel systems.
- Chassis Systems: ABS, traction control, and suspension.
- Body Electronics: Lighting, windows, HVAC.
- Infotainment: Navigation and media systems.
- ADAS: Communication between radar, lidar, and camera sensors.
Diagnosing CAN Bus Problems
Common issues include:
- Open or short circuits on CAN H/L lines.
- Incorrect termination resistance (should total 60 ohms).
- ECU faults causing bus flooding.
- EMI interference from high-current devices.
Technicians use oscilloscopes, logic analyzers, or OBD-II scanners to observe bus traffic and identify frame errors or lost arbitration.
The Future of Automotive Networking: Beyond CAN
While CAN remains the dominant in-vehicle network, new architectures are emerging:
- Ethernet-based networks (Automotive Ethernet) offer gigabit speeds for data-heavy applications.
- LIN (Local Interconnect Network) serves simpler, slower subsystems.
- FlexRay and MOST provide redundancy and multimedia communication, respectively.
Yet, even as vehicles become more connected, CAN continues to evolve — serving as the spinal cord of the automotive ecosystem, bridging legacy systems and next-generation electronics.
Top 5 Frequently Asked Questions
Final Thoughts
The CAN Bus revolutionized automotive engineering, transforming vehicles from mechanical systems into intelligent, interconnected networks. Its efficiency, robustness, and scalability make it indispensable — even in the age of electric and autonomous vehicles. Understanding CAN fundamentals isn’t just for engineers — it’s essential for anyone working in modern vehicle design, diagnostics, or innovation.
Resources
- Bosch, CAN Specification Version 2.0
- ISO 11898-1:2015, Road vehicles — Controller area network (CAN)
- Vector Informatik: https://www.vector.com
- Texas Instruments, Introduction to the Controller Area Network (CAN)
- NXP Semiconductors, CAN FD Technical Overview



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave A Comment